Владимир Рентюк, Запорожье, Украина
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель - электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра - это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
К двигателям постоянного тока относятся два типа - это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор - коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к .
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три - это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, . Возможные варианты такой схемы представлены на Рисунке 2.
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как R LIM . Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором - минимальную. Что выбрать - зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию ; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением V IN и выходным V OUT , равной 3 В, будет рассеиваться мощность не менее
P = (V IN - V OUT)×I = 3×1 = 3 Вт.
Таким образом, нужен радиатор. Опять вопрос - на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
Выход из положения - использовать для управления метод широтно-импульсной модуляции (ШИМ). Он, действительно, самый распространенный. Его суть - подача на двигатель промодулированных по длительности однополярных прямоугольных импульсов. Согласно теории сигналов, в структуре такой последовательности имеется постоянная составляющая, пропорциональная отношению τ/T, где: τ - длительность импульса, а T - период последовательности. Вот она-то и управляет скоростью двигателя, который выделяет ее как интегратор в этой системе. Поскольку выходной каскад регулятора на основе ШИМ работает в ключевом режиме он, как правило, не нуждается в больших радиаторах для отвода тепла, даже при относительно больших мощностях двигателя, и КПД такого регулятора несравненно выше предыдущего. В ряде случаев можно использовать понижающие или повышающие DC/DC-преобразователи, но они имеют ряд ограничений, например, по глубине регулировки выходного напряжения и минимальной нагрузке. Поэтому, как правило, чаще встречаются иные решения. «Классическое» схемное решение такого регулятора представлено на Рисунке 4 . Оно использовано в качестве дросселя (регулятора) в профессиональной модели железной дороги.
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа . Особенности этого транзистора типа MOSFET - большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов - это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.
Если использовать биполярный транзистор, то возникает проблема формирования достаточного по величине базового тока. Как известно, для насыщения ключа на биполярном транзисторе ток его базы должен быть, по крайней мере, не менее 0.06 от тока нагрузки. Понятно, что операционный усилитель такой ток может не обеспечить. С этой целью в аналогичном, по сути, регуляторе, который используется, например, в популярном мини-гравере PT-5201 компании , применен транзистор , представляющий собой схему Дарлингтона. Тут интересный момент. Эти мини-граверы иногда выходят из строя, но не из-за перегрева транзистора, как можно было бы предположить, а из-за перегрева ИМС (максимальная рабочая температура +70 °С) выходным транзистором (максимально допустимая температура +150 °С). В изделиях, которыми пользовался автор статьи, он был вплотную прижат к корпусу ИМС и посажен на клей, что недопустимо нагревало ИМС и почти блокировало теплоотвод. Если вам попалась такое исполнение, то лучше «отклеить» транзистор от ИМС и максимально отогнуть. За это know-how автор статьи был премирован компанией Pro’sKit набором инструментов. Как видите все нужно решать в комплексе - смотреть не только на схемотехнику, но и внимательно относится к конструкции регулятора в целом.
Есть еще несколько интересных схем более простых ШИМ-регуляторов. Например, две схемы на одиночном операционном усилителе с драйвером опубликованы в [
Добавить сайт в закладки
Проследим устройство и работу вначале силовых (главных) цепей, а затем цепей управления.

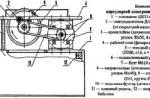
Рисунок.1 Схема управления асинхронным короткозамкнутым двигателем при помощи нереверсивного .
Силовые цепи. к статору электродвигателяД поступает через трехполюсный рубильник Р. Рубильник дает возможность отключить электродвигатель в случае ремонта или выхода из строя . Далее в силовой цепи находятся предохранители 1П, которые помещаются обычно на групповом распределительном щитке; они защищают цепи от коротких замыканий. Главные контакты Л трехполюсного линейного контактора включают или отключают обмотку статораэлектродвигателя. Подключены главные контакты таким образом, чтобы подвижные контакты располагались со стороны двигателя, а неподвижные, всегда находящиеся под напряжением, - со стороны сети, такое подключение повышает безопасность обслуживания. Тепловые реле включаются в две фазы, так как чрезмерно большой ток возможен не менее чем в двух проводах, они служат для защиты двигателя от длительных перегрузок и от работы на двух фазах.
Применение в схеме наряду с тепловыми реле плавких предохранителей объясняется тем, что силовые контакты магнитных пускателей допускают разрыв токов перегрузки не больше семикратной величины номинального тока электродвигателя, мощность которого допустима в данном пускателе; а на разрыв токов короткого замыкания эти контакты не рассчитаны. В силовую цепь включаются нагревательные элементы реле.
Цепи управления. Питание цепи управления осуществляется здесь через рубильник и предохранители главной цепи. Кроме того, цепи управления защищены своим одним предохранителем 2П, он защищает цепь управления от коротких замыканий. Как видно из схемы, цепь управления питается напряжением такой же величины, что и силовая цепь.
В цепь управления включены кнопки «стоп» и «пуск».

Рисунок 2 Схема управления асинхронным короткозамкнутым двигателем с возможностью реверсирования.
Катушка Л линейного контактора с блок-контактном Л 1 при помощи своих главных контактов Л в силовой цепи осуществляет включение и отключение электродвигателя Д. Далее в цепь управления включены размыкающие контакты (с ручным возвратом) тепловых реле 1РТ и 2РТ, нагревательные элементы которых включены в главную цепь. У некоторых типов тепловых реле имеются два нагревательных элемента и только один размыкающий контакт, на который может воздействовать посредством рычажной системы каждая из биметаллических пластин.
Схема работает следующим образом. Для пуска двигателя после включения рубильника Р следует нажать кнопку «пуск». При этом замыкается цепь катушки контактора Л. Ток идет по следующей цепи: фаза Л 1 - предохранитель 2П - размыкающая кнопка «стоп» - кнопка «пуск» - катушка контактора Л - размыкающие контакты тепловых реле 1РТ и 2РТ - фаза Л 3 . Вследствие того, что по катушке контактора проходит ток, сердечник ее намагничивается, якорь втягивается и включает главные контакты. Выводы обмотки статора С 1 C 2 С3 присоединяются к сети питания Л 1 , Л 2 , Л 3 , и двигатель включается. Одновременно с главными контактами замыкаются и блок-контакты так, что цепь катушки контактора замыкается через блок-контакт Л 1 шунтирующий кнопку «пуск». Теперь уже не нужно больше удерживать кнопку в нажатом состоянии; за счет действия пружины она возвращается в исходное положение. Для отключения двигателя следует нажать кнопку «стоп»; при этом питание катушки контактора Л прерывается, и главные контакты под действием веса или пружины размыкаются и отсоединяют обмотку статора от сети.

Рассмотренная схема осуществляет и так называемую «нулевую» (или минимальную) защиту: при исчезновении или значительном снижении напряжения сети до 35-40% номинального значения контактор отключается и отключает электродвигатель от сети.
При восстановлении напряжения самопуска двигателя уже не произойдет, так как кнопка «пуск» отпущена, а блок-контакт Л 1 разомкнут.
В случае длительной перегрузки размыкающий контакт теплового реле 1РТ (2РТ) отключает контактор, а следовательно, и двигатель. После действия реле тепловой защиты (если тепловое реле выполнено по принципу принудительного возврата) для возврата контакта реле в исходное положение следует нажать на кнопку, которая помещается на крышке пускателя; возврат контактов реле 1РТ (2РТ) после отключения возможен только через время, необходимое для того, чтобы биметаллические пластинки остыли.
Магнитные пускатели изготовляются для управления электродвигателями до 75-100 кВт. Рассмотренная схема может быть собрана также и с контактором. Для асинхронных двигателей напряжением до 500 В обычно применяются трехполюсные контакторы переменного тока серии КТ с катушкой переменного тюка.

Для управления механизмами, требующими изменения направления вращения (реверсирования), применяется либо реверсивный магнитный пускатель, либо схема управления с двумя контакторами, мало отличающаяся от схемы реверсивного пускателя.
На рис. 2 приведена схема управления асинхронным короткозамкнутым двигателем с возможностью реверсирования. Как и схема управления с магнитным пускателем, данная схема допускает дистанционное управление, так как , которых в этой схеме три - «вперед», «назад» и «стоп», можно поместить на некотором расстоянии от двигателя. При помощи схемы, изображенной на рис. 2, можно пустить двигатель (и, следовательно, связанный с ним механизм), изменить направление вращения, остановить его; кроме того, схема осуществляет защиту установки от коротких замыканий, от перегрузки, от падения напряжения в сети (нулевая защита) и от самопуска. В этой схеме совмещаются две схемы нереверсивного пуска и имеются некоторые особенности. Схема снабжена двумя контакторами: контактором «вперед» (катушка и ее три главных контакта обозначены буквой В, а блок-контактыB 1 и В2) и контактором «назад» (катушка и три главных контакта обозначены буквой Н, а блок-контакты H1 и Н2). Главные контакты контакторов В и Н включены в силовую цепь таким образом, что когда замыкаются контакты В (контакты Н при этом разомкнуты), на обмотку статора подаются три фазы сети в одном порядке, а когда замыкаются контакты Н, две фазы из трех меняются местами. В связи с этим магнитное поле статора двигателя начинает вращаться в обратную сторону, и двигатель реверсируется.
Действительно, при включении контактов В фаза Л 1 сети подается на обмотку статора С 1, фаза Л 2 - на С 2 , фаза Л 3 - на С 3. Если же замыкаются контакты Н, то фаза Л 1 подается на обмотку С 3 , фаза Л 2 - на С 2 (без изменения), фаза Л 3 - наС 1, следовательно, фазы Л 1 и Л 3 меняются местами.
Схема работает следующим образом. Для включения двигателя в направлении «вперед» нажимается кнопка «вперед»; при этом ток от фазы Л 2 идет по цепи: 1 - 3 - 5 - 7 - 6 - 4 - 2 - фаза Л 3 ; катушка В замыкает свои главные контакты В, и двигатель включается на движение «вперед». Для изменения направления вращения включается кнопка «стоп», а затем включается кнопка «назад»; при этом ток идет по цепи: фаза Л 2 - 1 - 3 - 9 - 11 - 6 - 4 - 2 - фаза Л 3 . Теперь ток уже идет по катушке Н, которая замыкает свои контакты, и двигатель реверсируется. Одновременное включение обоих контакторов в рассмотренной схеме может привести к короткому замыканию в силовой цепи. Если двигатель включить в направлении, например, «вперед» и по ошибке нажать кнопку «назад», то катушка Н также включит свои контакты (контакты В были включены ранее, поскольку двигатель работал в направлении «вперед»), в силовой цепи окажутся включенными все шесть главных контактов, что приведет к короткому замыканию в двух фазах (Л 1 и Л 3). Чтобы этого не произошло, в схеме применяются двухцепные кнопки «вперед» и «назад»; при нажатии кнопки «вперед» одновременно размыкается контакт в цепи катушки Н, и наоборот, если нажать кнопку «назад», то размыкается контакт катушки В. Это устройство называется механической блокировкой. Для увеличения надежности работы схемы механической блокировкой снабжаются также якори катушек контакторов, которые имеют специальный рычаг: втягивание якоря одной катушки делает невозможным одновременное втягивание якоря второй катушки.
Кроме механической применяется также электрическая блокировка. На рис. 2 кнопки управления «вперед» и «назад» обычные; однако в цепь катушки «вперед» включен размыкающий контакт контактора «назад», и наоборот, в цепь катушки «назад» включен размыкающий контакт контактора «вперед». Если нажать, например, кнопку «назад», то ток пройдет по катушке контактора «назад», контактор замкнет свои замыкающие контакты и разомкнет свой размыкающий контакт Н2 в цепи катушки В. Следовательно, пока включена катушка контактора Н, цепь катушки контактора В будет разомкнутой, и включить катушку В одновременно с катушкой Н невозможно. Это устройство называется электрической блокировкой. Для увеличения надежности работы схемы одновременно с электрической применяют механическую блокировку.
Для управления силовым электрооборудованием в электрических цепях используют разнообразные устройства дистанционного управления, защиты, телемеханики и автоматики, воздействующие на коммутационные аппараты его включения и отключения или регулирования.
На рис.5.4 приведена принципиальная схема управления асинхронным электродвигателем с короткозамкнутым ротором. Данная схема широко используется на практике при управлении приводами насосов, вентиляторов и многих других.
Перед началом работы включают автоматический выключатель QF. При нажатии кнопки SВ2 включается пускатель КМ и запускается двигатель М. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Рис.5.4. Схема включения асинхронного электродвигателя с короткозамкнутым ротором
При перегрузке электродвигателя М срабатывает электротепловое реле КК, размыкающее контакты КК:1 в цепи катушки КМ. Пускатель КМ отключается, двигатель М останавливается.
В общем случае схемы управления могут осуществлять торможение электропривода, его реверсирование, изменять частоту вращения и т.д. В каждом конкретном случае используется своя схема управления.
В системах управления электроприводами широко используются блокировочные связи. Блокировкой обеспечивают фиксацию определенного состояния или положения рабочих органов устройства или элементов схемы. Блокировка обеспечивает надежность работы привода, безопасность обслуживания, необходимую последовательность включения или отключения отдельных механизмов, а также ограничение перемещения механизмов или исполнительных органов в пределах рабочей зоны.
Различают механическую и электрическую блокировки.
Примером простейшей электрической блокировки, применяемой практически во всех схемах управления, является блокировка кнопки «Пуск» SB2 (рис. 5.4.) контактом КМ2. Блокировка этим контактом позволяет после включения двигателя кнопку SB2 отпустить, не прерывая цепи питания катушки магнитного пускателя КМ, которое идет через блокировочный контакт КМ2.
В схемах реверсирования электродвигателей (при обеспечении движения механизмов вперед-назад, вверх-вниз и т.д.), а также при торможении применяются реверсивные магнитные пускатели. Реверсивный магнитный пускатель состоит из двух нереверсивных. При работе реверсивного пускателя необходимо исключить возможность их одновременно включения. Для этого в схемах предусматриваются и электрическая, и механическая блокировки (рис. 5.5). Если реверсирование двигателя выполняется двумя нереверсивными магнитными пускателями, то роль электрической блокировки играют контакты КМ1:3 и КМ2:3, а механическая блокировка обеспечивается кнопками SВ2 и SВ3, каждая из которых состоит из двух контактов, связанных между собой механически. При этом один из контактов-замыкающий, другой - размыкающий (механическая блокировка).
Схема работает следующим образом. Предположим что при включении пускателя КМ1 двигатель М вращается по часовой стрелке и против часовой - при включении КМ2. При нажатии кнопки SВ3 сначала размыкающий контакт кнопки разорвет цепь питания пускателя КМ2 и только потом замыкающий контакт SВ3 замкнет цепь катушки КМ1.

Рис.5.5. Механическая и электрическая блокировки при реверсировании привода
Пускатель КМ1 включается, запускается с вращением по часовой стрелке двигатель М. Контакт КМ1:3 размыкается, осуществляя электрическую блокировку, т.е. пока включен КМ1, цепь питания пускателя КМ2 разомкнута и его нельзя включить. Для осуществления реверса двигателя необходимо его остановить кнопкой SВ1, а затем, нажав кнопку SВ2, запустить в обратную сторону. При нажатии SВ2 сначала размыкающим контактом SВ2 разрывается цепь питания катушки КМ1 и далее замыкается цепь питания катушки КМ2 (механическая блокировка). Пускатель КМ2 включается и реверсирует двигатель М. Контакт КМ2:3, размыкаясь, осуществляет электрическую блокировку пускателя КМ1.
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла. Такое устройство называется механической блокировкой, не позволяющей силовым контактом одного пускателя КМ1 одновременно замыкаться силовым контактам другого пускателя КМ2 (рис. 5.6).

Рис. 5.6. Механическая блокировка «коромыслом» подвижных частей двух пускателей единого реверсивного магнитного пускателя
Электрическая схема управления реверсом двигателя при помощи двух простейших пускателей единого реверсивного магнитного пускателя такая же, как и электрическая схема управления реверсом двигателя с использованием двух нереверсивных магнитных пускателей (рис. 5.5), с применением в электрической схеме таких же электрических и механических блокировок.
При автоматизации электроприводов поточных линий, конвейеров и т.п. применяется электрическая блокировка, которая обеспечивает пуск электродвигателей линии в определенной последовательности (рис. 5.7). При такой схеме, например, включение второго двигателя М2 (рис. 5.7) возможно только после включения первого двигателя М1, включение двигателя М3 – после включения М2. Такая очередность пуска обеспечивается блокировочными контактами КМ1:3 и КМ2:3.

Рис.5.7. Схема последовательного включения двигателей
Пример 5.1. Используя электрическую схему (рис. 5.4) управления асинхронным электродвигателем с короткозамкнутым ротором, необходимо включить в эту схему дополнительные контакты, обеспечивающие автоматическую остановку электродвигателя рабочего механизма в одной и в двух заданных точках.
Решение. Требование задачи обеспечить остановку электродвигателя в одной заданной точке может быть выполнено путевым выключателем SQ1 с нормально закрытым контактом, установленным последовательно с блок-контактом KM2, шунтирующим кнопку SB2. Для остановки электродвигателя рабочего механизма в двух заданных точках последовательно с контактом путевого выключателя SQ1 размещают контакт второго путевого выключателя SQ2. На рис. 5.8 приведены электрические схемы остановки электродвигателя в одной и в двух заданных точках. После пуска двигателя механизм приходит в движение и при достижении места остановки нажимает на путевой выключатель, например SQ1, и электродвигатель останавливается. После выполнения необходимой технологической операции вновь нажимаем на кнопку SB2, и механизм продолжает движение до следующего путевого выключателя SQ2, где технологическая операция заканчивается.

Рис. 5.8 К примеру 5.1
Пример 5.2. В электрическую схему (рис. 5.5) управления реверсом короткозамкнутого асинхронного двигателя с помощью блокировочных связей следует ввести элементы световой сигнализации для контроля направления вращения двигателя.
Решение. Схема световой сигнализации контроля направления вращения двигателя при реверсе, совмещённая со схемой управления реверсом двигателя, приведена на рис. 5.9. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.4 магнитного пускателя KM1, при этом лампа HL2 погашена, т.к. магнитный пускатель KM2 не включён. При вращении двигателя влево горит лампа HL2, включённая контактом KM2.4 магнитного пускателя KM2. Таким образом, лампа HL1 сигнализирует о вращении двигателя вправо, а лампа HL2 - о вращении двигателя влево. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе.

Рис. 5.9 К примеру 5.2
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются . Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются .

Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок "пуск" и "стоп",
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
Схема показана на рисунке.

При нажатии на SB2 "Пуск" на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем (N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке "Пуск". Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки "Пуск" катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют "толчковым". Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 "Стоп". При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку "Стоп" и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2
"Пуск". Таким образом, магнитный пускатель обеспечивает т.н. "нулевую защиту". Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь - .
Анимация процессов, протекающих в схеме показана ниже.

Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы - A , B , С, а при включении пускателя KM2 - порядок фаз меняется на С, B , A.
Схема показана на рис. 2.

Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 "Стоп", двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку "Стоп".
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок "Пуск" SB2 - SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки "Пуск" включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.

3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.

Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 "Стоп"включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 - нормально-закрытый (размыкающий) контакт, в цепи КМ3 - кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 - нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку "Стоп", что очень удобно. Кнопка "Стоп" нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
15.09.2014
Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока, двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором.
Схема использует питание силовых цепей и цепей управления от источника одного и того же напряжения (рис. 4.9). Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Если рубильник S1 включен, то для пуска электродвигателя необходимо нажать на кнопку S2 («пуск»). При этом катушка контактора K1M получит питание, замкнутся главные контакты К1(1-3)М в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начнет вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт K1A, шунтирующий кнопку S2 («пуск»), после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора KlM остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 («стоп»). Катушка контактора K1M обесточивается и замыкающие контакты K1(1-3)M отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт K1A. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F 1(1-3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1-2). Пружинный привод контактов магнитного пускателя К 1(1-3)М, K1A на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель от сети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя.
Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей (рис. 4.10). Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.

В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепителями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания, Электротепловые расцепители обладают обратнозависимой характеристикой времени от тока. Так, расцепитель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной - через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20 - 30%, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем. Многие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков.
Схемы управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем. Эта схема применяется в случаях, когда необходимо изменять направления вращения электропривода (рис. 4.11), например в приводе электролебедок, рольгангов, механизмов подачи станков и т.д. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора K1M будет под напряжением, и замыкающие главные контакты К1(1-3)M присоединят электродвигатель к сети. Для переключения электродвигателя необходимо нажать на кнопку S3 («стоп»), а затем на кнопку S2 («назад»), что вызовет отключение контактора K1M и включение контактора К2М. При этом, как видно из схемы, две фазы на статоре переключатся, т.е. произойдет реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует втягиванию одного контактора, если включен другой. Для повышения надежности кроме механической блокировки в схеме предусмотрена электрическая блокировка, которая осуществляется при помощи размыкающих вспомогательных контактов К1А.2 и К2А.2. Обычно реверсивный магнитный пускатель состоит из двух контакторов, заключенных в один корпус.
В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Ho для устранения возможности короткого замыкания между первой и третьей фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 («вперед») цепь катушки контакторов K1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на рис. 4.12.) Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Такая схема приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ с замыканием трех силовых контактов К3. Одновременно замыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и размыкается К3А - вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора К3 обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт К3А, шунтирующий кнопку S3, и замыкается вспомогательный контакт К3А в цепи катушки К4.
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замыкаются пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замыкается вспомогательный контакт К4А, шунтирующий кнопку S4 и размыкается вспомогательный контакт К4А в цепи катушки контактора К3. Обычно контакторы переменного тока имеют три силовых контакта, в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов K1 и К2 для вращения вперед или назад. Включение контакторов K1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов K1 и К2, а также К3 и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя вперед или назад без нажатия кнопки S5 («стоп»). При нажатии кнопки S5 катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т.п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с коротко-замкнутым ротором с использованием торможения противовключением. Такая схема изображена на рис. 4.13. В схемах торможения противовключением используется реле контроля скорости (PKC) ЕМ, механически связанное с валом двигателя; его замыкающий контакт EA при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и скорости его вращения менее 10...15% от номинальной контакт реле EA разомкнут. Нажатием кнопки SI включается контактор K1M, замыкаются силовые контакты К1(1-3)M и двигатель пускается в ход, замыкается вспомогательный контакт K1A.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт А7А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замыкается контакт реле скорости EA. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются силовые контакты К1(1-3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт K1A.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2. При этом двигатель вращается по инерции и контакт реле EA замкнут, следовательно, катушка контактора К2А получит питание, замкнутся главные контакты К2(1-3)М, разомкнется вспомогательный контакт К2А в цепи катушки K1M. Обмотки статора будут подключены к сети на реверс вращения ротора. Ротор мгновенно затормаживается и при скорости вращения, близкой к нулю, контакт реле скорости EA размыкается, катушка контактора К2М обесточивается, главные контакты К2(1-3)М размыкаются, замыкается вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.
Рассмотренная типовая схема торможения противовключением является основой построения схем управления электродвигателями станков заточки цепных, круглых, рамных пил, схем обрезных станков и др. Торможение противовключением обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма. Такая схема представлена на рис. 4.14. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Tс пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 («пуск»), катушка контактора K1M будет под напряжением, замкнутся три контакта К1(1-3)М в силовой цепи и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Электромагнит Y одновременно отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 («стоп») обесточивается катушка контактора K1M, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз с пружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.
Схема фрикционного торможения асинхронного электродвигателя станочного оборудования. Такая схема показана на рис. 4.15. В нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта K1A и силовых контактов К1(1-3)М. Остановка электропривода станка производится нажатием двухцепной кнопки S2 («стоп»). При этом катушка контактора K1M обесточивается, размыкаются главные контакты в силовой цепи К1(1-3)М и вспомогательный контакт K1A. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1-2)М, электромагнит Y затягивает колодочный тормоз. Кнопка S2 освобождается и принимает исходное положение, контактор К2М обесточивается, контакты К2(1-2)М размыкаются. Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, в которых учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения. Такая схема приведена на рис. 4.16. Динамическое торможение, в отличие от торможения противовключением и фрикционного метода, является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки SI («пуск»). Контактор K1M будет включен, замкнутся три главных контакта К1(1-3)М в силовой цепи, замкнется вспомогательный контакт K1А.1, разомкнется контакт К1А.2, замкнется контакт К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 («стоп»). Контактор К1М теряет питание, главные контакты К1(1-3)М размыкаются, размыкаются вспомогательные контакты K1A.1, К1А.3, и замыкается контакт К1А.2. Катушка реле времени Д1M теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнется с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А.2 катушка контактора К2М получит питание, разомкнется вспомогательный контакт блокировки К2А и замкнутся контакты К2(1-2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС.
Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя

где Mн - номинальный момент двигателя; nс - синхронная скорость двигателя; I"р - приведенный к статору ток ротора; R"р - полное активное сопротивление ротора, приведенное к статору; nд - относительная скорость двигателя, nд = n/nс.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором. Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя. Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1...VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В - V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1...VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1...VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6.2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени. Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок - электротепловыми реле F4(1-2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.
При последующем нажатии кнопки S2 («пуск») через замкнувшийся ранее контакт Д1А.2 включится контактор K1M, замкнутся главные контакты К1(1-3) M в силовой цепи, в обмотку статора двигателя M будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт K1A.3, шунтирующий пусковую кнопку, и замкнется контакт K1A.2, через который подается питание в цепь катушек реле времени Д2М, Д3М. Размыкающий вспомогательный контакт K1A.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А.1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З - закроется. В результате этих переключений в схеме управления включится контактор К2М и будет шунтирована первая пусковая ступень резистора - двигатель с первой реостатной характеристики перейдет на вторую, разогнавшись до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора К3М, который сработает и замкнет свои контакты К3(1-2)М, т.е. шунтируется вторая пусковая ступень резистора - двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле Д3М - с выдержкой времени, на которое настроено реле Д3М (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт Д3А.1, включится контактор К4М и замкнет свои контакты К4(1-3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, Д3М.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.